Fractional-orderiterative learning control with initial state learning design
Zhao, Yang, Fengyu Zhou*, Yugang Wang, and Yan Li.
Abstract:In this paper, wepresent a fractional-order iterative learning control (ILC) framework with initialstate learning for the tracking problems of linear timevarying systems. Bothopen-loop and closed-loop Dα-type iterative learning updating lawsare considered. To design ILC scheme for practical control systems,initialization assumption, i.e., the system initial states should be the sameat each repetition, is removed by using an initial state learning schemetogether with the Dα-type ILC updating law. Sufficient conditions ofconvergence to the desired trajectory is theoretically proved for a lineartime-varying mechanical system. Numerical simulation results are presented toillustrate effectiveness of the control strategies. Moreover, we also show thatthe proposed learning scheme can be applied to the motion control of robotmanipulators under some reasonable conditions.
Keywords:Fractional calculus · Iterative learning control · Manipulator system ·Tracking control
Highlight:
Ø Thispaper has presented Dα-type iterative learning tracking strategies for a lineartime-varying mechanical system.
Ø In thisapproach, the requirement of fixing the initial states at each iteration isremoved by introducing an initial state learning scheme which can identify thedesired initial states through learning trials.
Ø Therobust convergent analysis of the tracking errors with respect toinitialization errors has been given in time domain.
Ø We alsodiscuss that the proposed learning scheme can be applied to the motion controlof robot manipulators under some reasonable conditions.
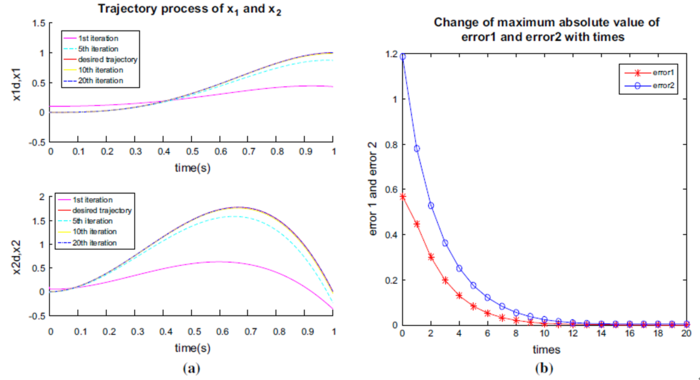
Fig.1 Trackingprocess of Example 1 under the open-loop FOILC scheme with initial condition Xk(0) = [0.1, 0.1]T
Nonlinear Dynamics (SCI,IF=3.464). https://link.springer.com/article/10.1007/s11071-017-3724-6.