在周风余教授的指导下,云基智能机器人实验室导航组以知识驱动为核心,实现了基于实例分割的物体级语义SLAM。
语义SLAM(Semantic Simultaneous Localization and Mapping)是一种高级机器人技术,旨在实现机器人在未知环境中的自主定位、导航和地图构建。这项技术的核心思想是将语义信息与传统的SLAM技术相结合,以便机器人可以更智能地感知环境、理解环境中的物体,并在导航和任务执行中更加灵活和高效地运用这些信息。
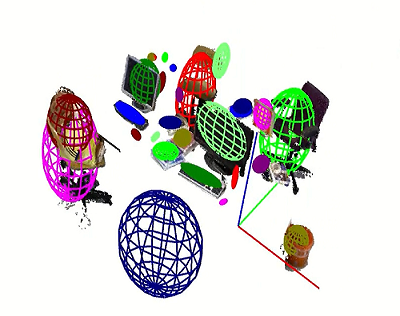
在基于实例分割的物体级语义SLAM技术中,椭球被引入用来表示环境中的物体。每个椭球包含了物体的几何特征,如位置、尺寸和朝向。通过这种方式,机器人可以通过几何表示精确捕捉环境中物体的特征,从而实现对物体准确感知。
本技术另一个关键步骤是将感知到的椭球与已有的地图数据进行融合。这种融合过程使机器人能够将几何信息与语义信息相结合,从而在地图中准确地标记出不同物体的位置和特征。这使得机器人能够在导航和决策过程中更好地理解环境,识别障碍物、可行走区域以及其他关键要素。
具体实验结果展示如下: