2023年11月11日,云基智能机器人实验室针对服务机器人自主导航的最新研究成果“Crowd-Aware Socially Compliant Robot Navigation via Deep Reinforcement Learning”被《International Journal of Social Robotics》在线发表,根据2023年12月最新升级版检索,该期刊是机器人学领域知名期刊,为JCR二区、中科院二区期刊,影响因子为4.7。
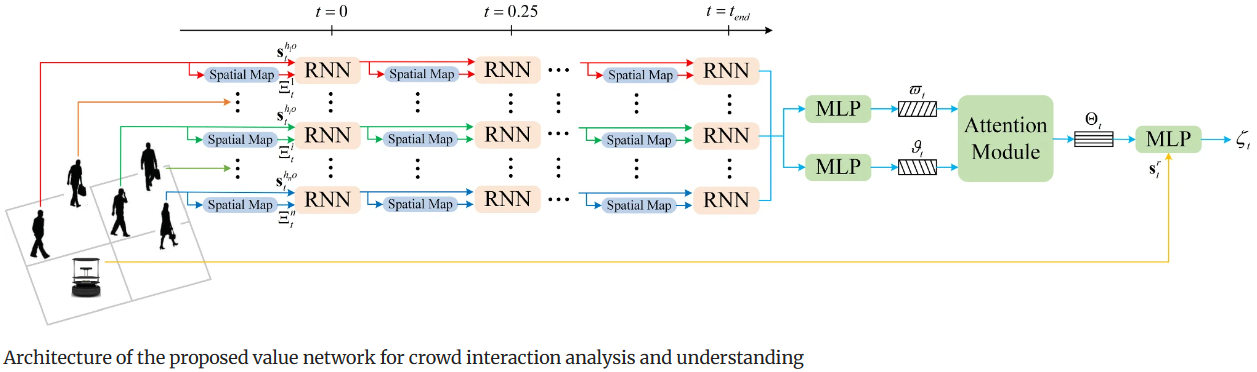
在拥挤环境中导航对于移动机器人来说是一项挑战,需要综合考虑人机安全和人类舒适度。该项成果基于深度强化学习框架实现安全且符合社交规范的机器人导航。提出一种新的价值网络用于机器人决策,利用时空推理理解人群交互。根据行人实时速度,设计机器人需躲避的危险区域并制定相应奖励函数,保证行人的安全和舒适。仿真实验证实所提方法在成功率和不适频率方面优于最先进方法。此外,真实世界实验表明所提方法能够有效预测行人运动并在人群中完成安全可靠导航。