在周风余教授的指导下,云基智能机器人实验室故障诊断组以服务机器人运动子系统为研究对象,在论证机器人故障诊断方案的基础上,分别对数据采集与处理、智能故障诊断算法以及云边协同系统等进行研究与设计。目前已在基于多源异构数据融合的智能故障诊断算法设计和云边端诊断系统搭建上取得突出进展。
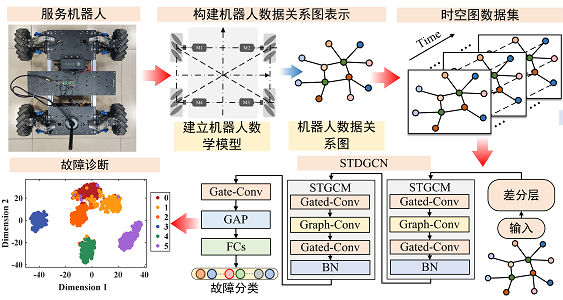
服务机器人的安全、可靠运行离不开高效的故障诊断算法和诊断系统。近期,在智能诊断算法研究中,本课题组成员提出了基于时空差分图卷积网络(Spatial-temporal difference graph convolutional network,STDGCN)的服务机器人故障诊断算法,并已发表于《IEEE Transactions on Industrial Informatics》期刊中。 STDGCN网络可以充分挖掘了机器人多传感器信号的时空相关性信息,实现了机器人的高精度故障诊断。
此外,在诊断系统设计方面,本课题组成员提出了一种云边协同故障诊断系统,实现了从边端数据收集、实时诊断,到云端数据分析、模型训练、模型下发部署等一体化功能。为验证有效性,在团队自主搭建的四轮机器人进行了系统测试,测试结果表明,所提云边协同系统可以有效实现云端和边端各种服务功能,并在搭载自主研发的故障诊断算法下,实现了对机器人各类故障的高效、准确诊断,大幅促进了服务机器人故障自诊断技术在现实场景中的应用。
