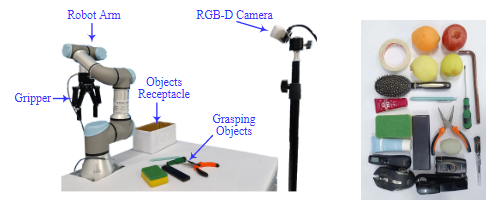
在周风余教授的指导下,云基智能机器人实验室知识组以知识驱动为核心,实现了知识迁移的机械臂持续抓取。
大量数据驱动的机器人抓取技术要求机器人根据由单一训练的抓取检测网络生成的预测抓取姿势来抓取特定物体。尽管这些网络的性能已接近完美,但仍有两大缺陷。首先,对于研究人员来说,获取包含各种抓取场景的数据集来训练一个抓取检测网络是一项耗时耗力的任务。其次,这些抓取检测网络通常表现出很差的泛化能力。它们可能无法在使用从新场景中获取的数据进行快速训练的同时保持之前的抓取性能。为了解决以上问题,提出了一种具有选择性知识模块的师生架构,以提炼出机器人抓取检测中的持续学习知识。