2024年6月10日,云基智能机器人实验室针对故障诊断的最新研究成果”Fault diagnosis of mobile robot based on dual-graph convolutional network with prior fault knowledge”在期刊《Advanced Engineering Informatics》在线发表,该期刊是工程技术领域TOP期刊,中科院一区,影响因子为8.0。
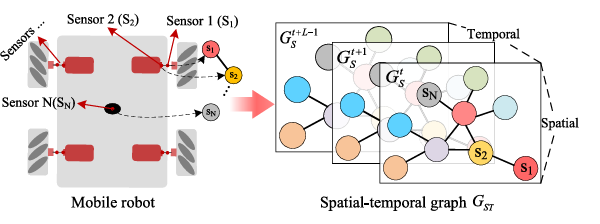
多传感器测量的有效集成对于移动机器人故障诊断至关重要。然而,在多传感器关系建模中,现有方法往往忽视了不同故障类型的影响,没有考虑数据样本之间的关系。针对这些问题,该文提出一种具有先验故障知识的新型双图卷积网络 (FKDGCN)。具体来说,我们基于先验故障知识构建多传感器拓扑图,有效地考虑了故障类别对传感器相关性的影响。随后,基于时间关系和数据相似性构建样本亲和图,并设计样本相关特征提取模块(SCFEM)来捕获数据样本之间的相互依赖性。最终,提出了一种新的双图卷积网络,将多样本特征和多传感器时空特征融合在一起,从而可以提取更全面的故障信息。FKDGCN 的有效性在从真实机器人故障诊断测试台收集的数据集上得到了彻底的验证。实验结果表明,与最先进的方法相比,FKDGCN 取得了出色的诊断性能,在平衡数据集上的平均准确率超过 98%,在两个不平衡数据集上的平均准确率超过 90%。