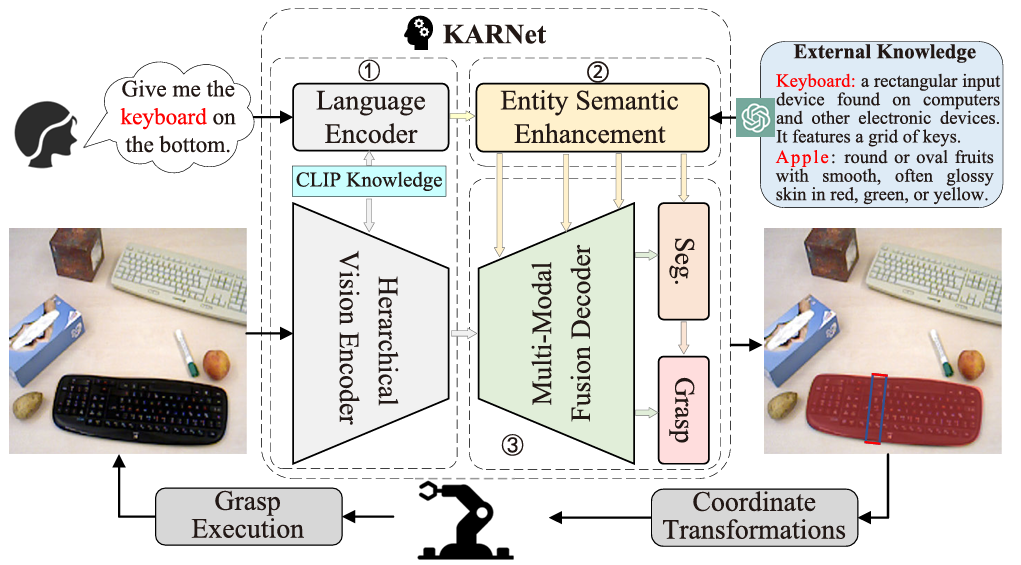
在机器人多模态认知与灵巧操作的前沿探索中,云基智能机器人实验室人机协作组以语言条件分割与抓取(LCSG)为研究核心,提出知识增强优化网络(Knowledge-Augmented Refinement Network, KARNet),攻克复杂家居场景中细粒度目标定位与抓取姿态推理难题。相关成果以97.97%抓取精度刷新领域性能记录,发表于《IEEE Transactions on Instrumentation and Measurement》等顶级期刊,并部署于真实机器人平台验证其工程实用性。
实验表明,KARNet在复杂家居数据集上取得分割交并比(OIoU)94.35%、抓取成功率97.97%的SOTA性能,较现有方法(如CLIP+Transformer)抓取稳定性提升23%。其“知识增强-语义解析-几何优化”三级架构,为物流分拣、智能仓储等工业场景提供了高鲁棒解决方案。
此项研究开创了语言-抓取联合推理的新范式,其知识驱动框架可泛化至多物体协同操作、动态场景自适应抓取等任务,为机器人自主认知与决策能力的进化开辟新路径。