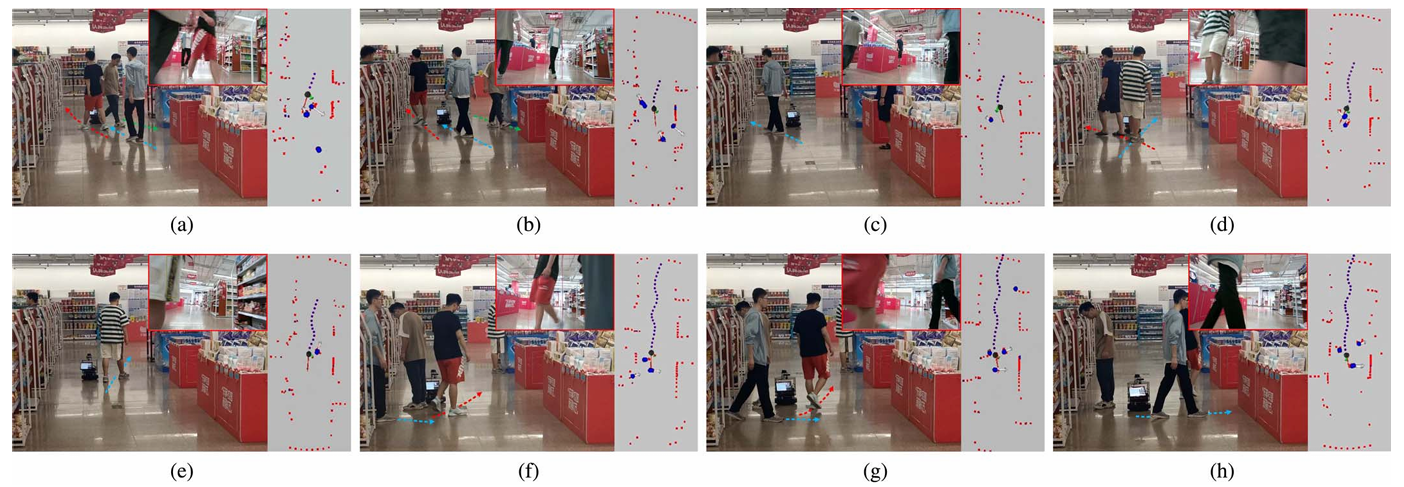
基于深度强化学习的机器人无地图导航VUCA环境
在自主移动机器人导航的前沿探索中,云基智能机器人实验室社会感知组以未知动态场景下的安全避障为研究核心,提出基于深度强化学习的时空推理导航框架(Spatial-Temporal Reasoning Navigation Framework, STRN),攻克高密度人流与复杂障碍环境中的社会化合规导航难题。相关成果以44%成功率提升、74.28%碰撞频率降低的突破性指标,并在真实商场、医院场景中验证其工程实用性。 STRN在模拟密集场景中实现98.2%导航成功率,较现有方法(如S