山东大学云基智能机器人实验室简介
【云基智能机器人实验室】(Cloud Intelligent Robotics Laboratory, CiR-Lab)隶属于山东大学机器人研究中心,研究领域:智能机器人,云机器人,机器人云服务平台,基于云平台的服务机器人场景感知与理解、类人导航、情感交互、故障诊断,认知学习及相关人工智能理论方法及应用。
实验室现有教授、研究员5人,副教授、副研究员3人,其中博导3人、硕导5人,工程师、实验师2人;博士研究生9人,硕士研究生20余人。人员结构合理,技术力量雄厚。近年来,主持国家重点研发计划1项、国家863计划1项、国家基金2项,省级项目12项,产品开发项目30项。在《IEEE Transactions on Evolutionary Computation》、《IEEE Transactions on Cybernetics》、《IEEE Transactions on Industrial Informatics》、《IEEE Transactions on Cloud Computing》、《Knowledge-Based Systems》、《Information Sciences》、《ISA Transactions》、《Expert Systems with Applications》、《Nonlinear Dynamics》、《自动化学报》、《机器人》和IFAC等国内外顶刊顶会发表论文137篇、高被引1篇,研究成果受到领域知名专家的高度评价;授权发明专利66项、软著20项,PTC国际专利2项、制定标准3项,其中10项专利成果落地转化。研制的云机器人产品量产上市,实现产值近9000万元;云基农业智能机器人成套装备被山东省农业农村厅列为重点应用推广项目;AI生成式低代码超融合智慧云平台部分实现了组态软件的国产替代,解决了中小微企业数字化转型缺人才、缺技术的痛点问题,在提高服务国家和区域经济发展能力和水平的“适配度”上做出重要贡献,被赋能企业每年可实现数亿元产值增长。上述成果获国家科技进步二等奖1项、山东省科技进步一等奖2项。
实验室配有多种机器人实验平台,主要包括自行研制的医院病房巡视机器人、老人陪护机器人、云基家庭安保及陪护机器人、德国KUKA youBot全向移动机械手臂、美国ActiveMedia研发的Pioneer 3-DX移动机器人、Leader1-DX服务机器人移动平台等共计10余台/套;还拥有与机器人配套的二自由度云台摄像机、立体视觉系统、Kinect体感传感器、声纳传感器、StarGazer红外定位系统、激光传感器以及各种开发和实验设备,实验和研究条件优良。
 基于深度强化学习的机器人无地图导航VUCA环境
基于深度强化学习的机器人无地图导航VUCA环境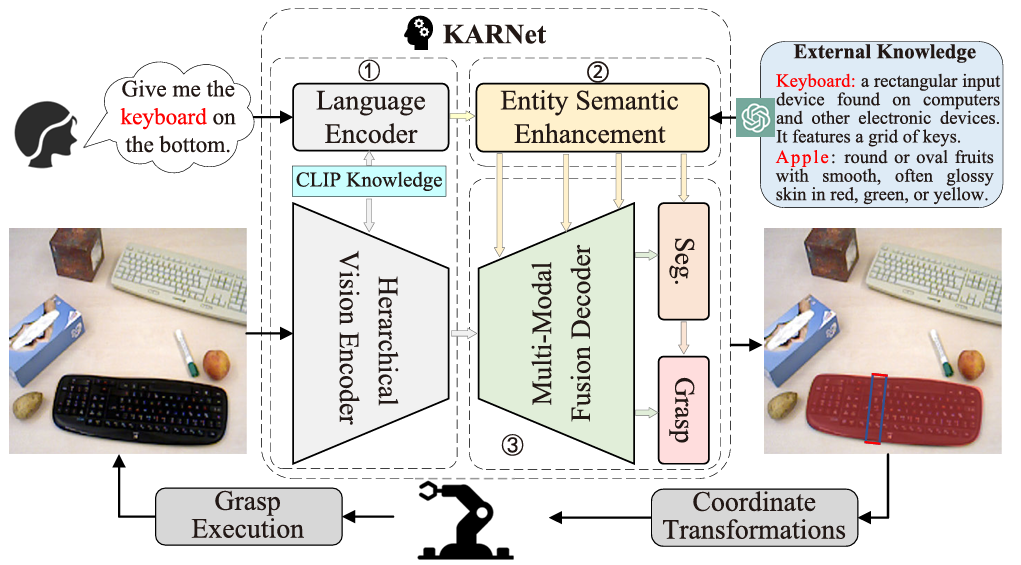 引入多源异构知识语言条件分割与掌握
引入多源异构知识语言条件分割与掌握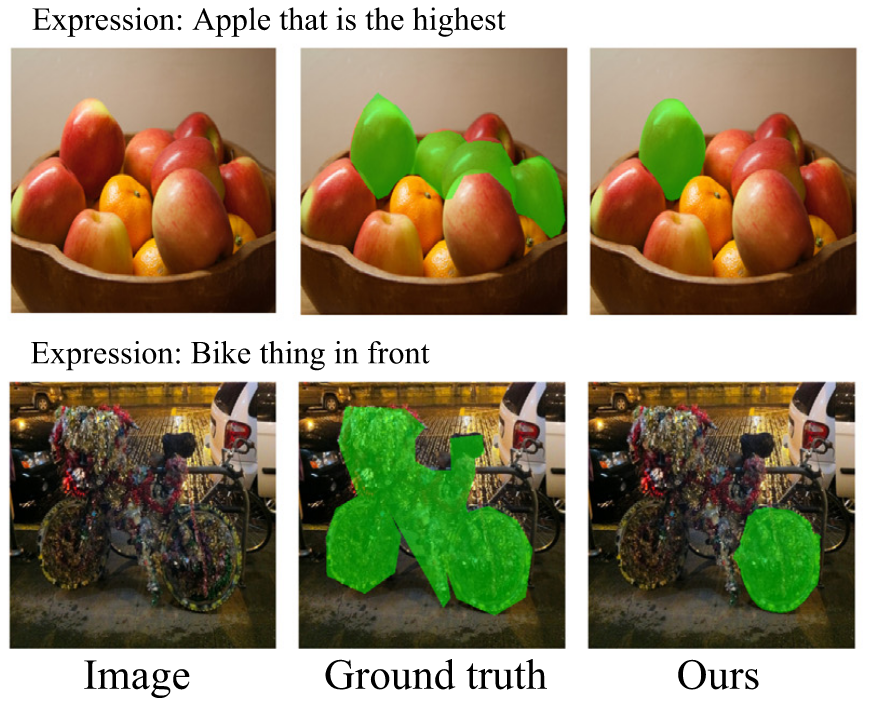 SATR:用于参考图像分割的语义感知三元细化网络
SATR:用于参考图像分割的语义感知三元细化网络 基于深度强化学习的人群感知导航
基于深度强化学习的人群感知导航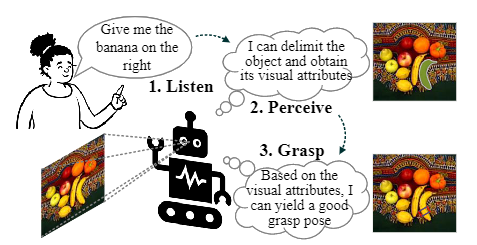 视觉语言融合的多模态机械臂抓取
视觉语言融合的多模态机械臂抓取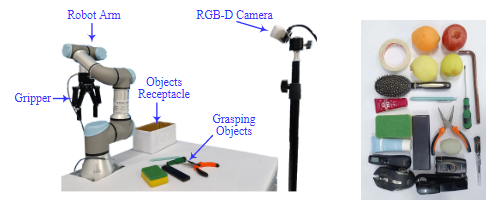 基于知识迁移的机械臂持续抓取
基于知识迁移的机械臂持续抓取